Toque delicado: robôs agora possuem mãos que sentem e identificam objetos
Um dos grandes desafios da robótica é conseguir reproduzir a sensibilidade da mão humana em uma máquina. Inúmeros humanoides possuem garras tão ou mais firmes e precisas que nossos dedos, mas o problema é que, por não sentirem, não conseguem distinguir os objetos que estão segurando.
Mas se depender do Laboratório de Ciências Computacionais e Inteligência Artificial (CSAIL) do MIT (Massachussets Institute of Technology), esse problema vai logo ser resolvido. Os cientistas já conseguiram produzir duas ferramentas que podem revolucionar a robótica usando material mole e flexível, inspiradas em como organismos vivos funcionam.
Esses robôs conseguem operar de maneira muito mais delicada e também são capazes de perceber com quais objetos estão interagindo.



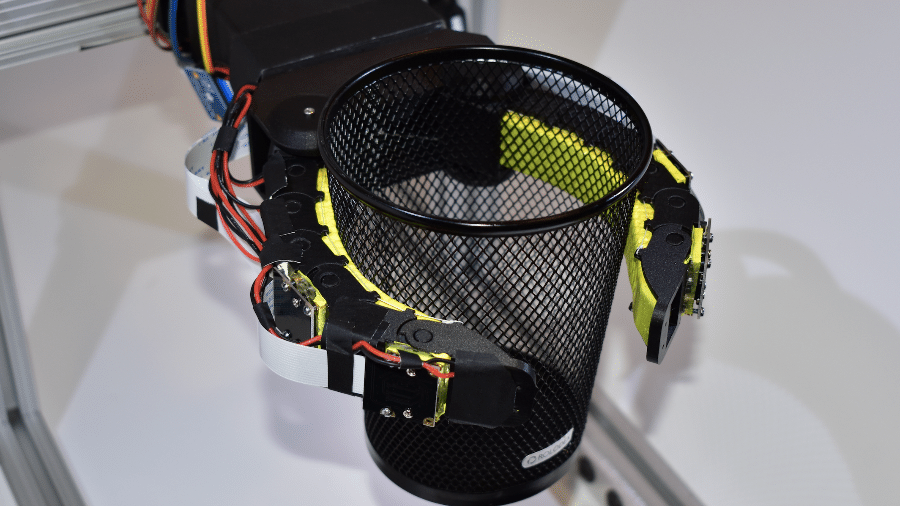
"As mãos macias dos robôs têm peles sensorizadas que permitem pegar uma variedade de objetos, desde delicados, como batatas fritas, até pesados, como garrafas de leite", afirmou a professora do MIT e diretora do CSAIL, Daniela Rus.
Em 2019, pesquisadores do MIT e da Universidade de Harvard desenvolveram uma pinça robótica no formato de cone que conseguia pegar objetos com até 100 vezes seu peso. O robô foi equipado com sensores táteis feitos de látex conectados a transdutores de pressão e, por isso, conseguia entender exatamente o que estava segurando e ajudar a quantidade de pressão exercida de acordo com cada objeto.
Os sensores do robô foram capazes de identificar os objetos com uma taxa de precisão de 90%.
Segundo a pesquisadora Josie Hughes, do MIT, os sensores táteis desenvolvidos pela equipe podem ser fabricados rapidamente e mostraram nos testes que são muito sensíveis e confiáveis.
Um segundo robô desenvolvido pelo MIT faz uso de um dedo "GelFlex" que usa um mecanismo acionado por tendões, sensores e câmeras para dar ao equipamento sensações semelhantes às humanas, com mais de 96% de precisão no reconhecimento de objetos.
A equipe agora espera ajustar os algoritmos de sensações e introduzir configurações mais complexas dos dedos, como a capacidade de torcê-los.










ID: {{comments.info.id}}
URL: {{comments.info.url}}
Ocorreu um erro ao carregar os comentários.
Por favor, tente novamente mais tarde.
{{comments.total}} Comentário
{{comments.total}} Comentários
Seja o primeiro a comentar
Essa discussão está encerrada
Não é possivel enviar novos comentários.
Essa área é exclusiva para você, assinante, ler e comentar.
Só assinantes do UOL podem comentar
Ainda não é assinante? Assine já.
Se você já é assinante do UOL, faça seu login.
O autor da mensagem, e não o UOL, é o responsável pelo comentário. Reserve um tempo para ler as Regras de Uso para comentários.